
Nesse post trato de um algoritmo extremamente famoso: O algoritmo de Dijkstra.
NOTA: Este post foi publicado, originalmente, em 2016.
O que é?
Citando a wikipedia:
O algoritmo de Dijkstra, concebido pelo cientista da computação holandês Edsger Dijkstra em 1956 e publicado em 1959, soluciona o problema do caminho mais curto num grafo dirigido ou não dirigido com arestas de peso não negativo, em tempo computacional O([m+n]log n) onde m é o número de arestas e n é o número de vértices.
Um exemplo de problema resolvido por Dijkstra
Para que possamos ter um ponto de partida, assumamos o seguinte grafo:
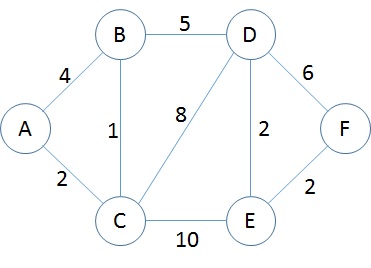
Considerando que os valores das arestas correspondem a uma distância, qual o caminho mais curto entre o vértice A e o vértice F?
Representando um grafo
Para que possamos implementar o algoritmo corretamente, comecemos definindo uma estrutura de classes para representar o nosso grafo.
public class Node
{
public string Label { get; }
public Node(string label)
{
Label = label;
}
readonly List _edges = new List();
public IEnumerable Edges => _edges;
public IEnumerable Neighbors =>
from edge in Edges
select new NeighborhoodInfo(
edge.Node1 == this ? edge.Node2 : edge.Node1,
edge.Value
);
private void Assign(Edge edge)
{
_edges.Add(edge);
}
public void ConnectTo(Node other, int connectionValue)
{
Edge.Create(connectionValue, this, other);
}
public struct NeighborhoodInfo
{
public Node Node { get; }
public int WeightToNode { get; }
public NeighborhoodInfo(Node node, int weightToNode)
{
Node = node;
WeightToNode = weightToNode;
}
}
public class Edge
{
public int Value { get; }
public Node Node1 { get; }
public Node Node2 { get; }
public Edge(int value, Node node1, Node node2)
{
if (value <= 0)
{
throw new ArgumentException("Edge value needs to be positive.");
}
Value = value;
Node1 = node1;
node1.Assign(this);
Node2 = node2;
node2.Assign(this);
}
public static Edge Create(int value, Node node1, Node node2)
{
return new Edge(value, node1, node2);
}
}
}
A classe Node representa nossos vértices. A classe Edge representa nossas arestas.
A inicialização do grafo de exemplo seria realizada assim:
var a = new Node("A");
var b = new Node("B");
var c = new Node("C");
var d = new Node("D");
var e = new Node("E");
var f = new Node("F");
a.ConnectTo(b, 4);
a.ConnectTo(c, 2);
b.ConnectTo(c, 1);
b.ConnectTo(d, 5);
c.ConnectTo(d, 8);
c.ConnectTo(e, 10);
d.ConnectTo(f, 6);
d.ConnectTo(e, 2);
e.ConnectTo(f, 2);
Certo?
Abstraindo o problema que queremos resolver
Há diversos algoritmos para encontrar o caminho mais curto entre dois nodos. Por isso, resolvi resumir nosso problema com a seguinte abstração:
interface IShortestPathFinder
{
Node[] FindShortestPath(Node from, Node to);
}
Basicamente, definimos uma função que retornará um vetor com o caminho a ser percorrido. Se não houver caminho possível, a função retornará null.
Implementando Dijkstra
Preparamos o terreno, agora, vamos a implementação.
public class Dijkstra : IShortestPathFinder
{
private class Weight
{
public Node From { get; }
public int Value { get; }
public Weight(Node @from, int value)
{
From = @from;
Value = value;
}
}
class VisitingData
{
readonly List _visiteds =
new List();
readonly Dictionary<Node, Weight> _weights =
new Dictionary<Node, Weight>();
readonly List _scheduled =
new List();
public void RegisterVisitTo(Node node)
{
if (!_visiteds.Contains(node))
_visiteds.Add((node));
}
public bool WasVisited(Node node)
{
return _visiteds.Contains(node);
}
public void UpdateWeight(Node node, Weight newWeight)
{
if (!_weights.ContainsKey(node))
{
_weights.Add(node, newWeight);
}
else
{
_weights[node] = newWeight;
}
}
public Weight QueryWeight(Node node)
{
Weight result;
if (!_weights.ContainsKey(node))
{
result = new Weight(null, int.MaxValue);
_weights.Add(node, result);
}
else
{
result = _weights[node];
}
return result;
}
public void ScheduleVisitTo(Node node)
{
_scheduled.Add(node);
}
public bool HasScheduledVisits => _scheduled.Count > 0;
public Node GetNodeToVisit()
{
var ordered = from n in _scheduled
orderby QueryWeight(n).Value
select n;
var result = ordered.First();
_scheduled.Remove(result);
return result;
}
public bool HasComputedPathToOrigin(Node node)
{
return QueryWeight(node).From != null;
}
public IEnumerable ComputedPathToOrigin(Node node)
{
var n = node;
while (n != null)
{
yield return n;
n = QueryWeight(n).From;
}
}
}
public Node[] FindShortestPath(Node @from, Node to)
{
var control = new VisitingData();
control.UpdateWeight(@from, new Weight(null, 0));
control.ScheduleVisitTo(@from);
while (control.HasScheduledVisits)
{
var visitingNode = control.GetNodeToVisit();
var visitingNodeWeight = control.QueryWeight(visitingNode);
control.RegisterVisitTo(visitingNode);
foreach (var neighborhoodInfo in visitingNode.Neighbors)
{
if (!control.WasVisited(neighborhoodInfo.Node))
{
control.ScheduleVisitTo(neighborhoodInfo.Node);
}
var neighborWeight = control.QueryWeight(neighborhoodInfo.Node);
var probableWeight = (visitingNodeWeight.Value + neighborhoodInfo.WeightToNode);
if (neighborWeight.Value > probableWeight)
{
control.UpdateWeight(neighborhoodInfo.Node, new Weight(visitingNode, probableWeight));
}
}
}
return control.HasComputedPathToOrigin(to)
? control.ComputedPathToOrigin(to).Reverse().ToArray()
: null;
}
}
A classe VisitingData foi uma “opção de design”. Escolhi não sujar a estrutura de dados do grafo com informações identificando se um nodo foi ou não visitado, nem com valores intermediários produzidos pelo algoritmo.
A ideia do algoritmo se aproxima muito de uma BFS. Percorremos todos os vértices do grafo, partindo do vértice de origem, atualizando o peso relativo dos vizinhos de cada elemento para o início do caminho (mantendo sempre o peso mais baixo). Além disso, agendamos uma visita para cada um desses “vizinhos” que será realizada primeiro naqueles com menor “valor”. Importante observar que tomamos o cuidado de não visitar um mesmo vértice duas vezes. No final do processo, o vértice destino terá a menor distância possível para o vértice de início. Além disso, terá uma referência para seu antecessor.
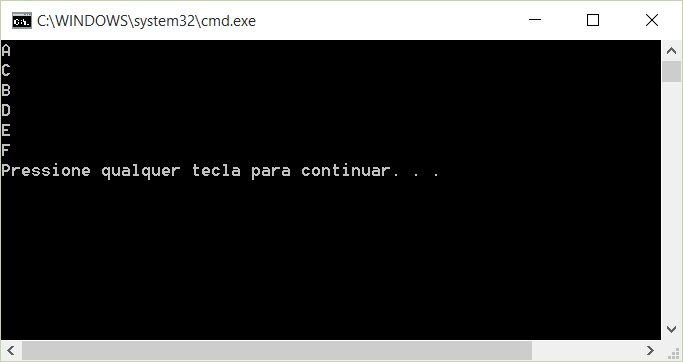
BTW, a saída desse programa é:
Excelente, Elemar! Há uns 2 meses atrás precisei implementar Dijkstra e nessas horas faz falta em C# uma estrutura de dados de complexidade de tempo mais ótima (fila de prioridade, por ex) para definir o próximo vizinho a ser visitado. No mundo real entendo que seria ideal implementar no muque algo similar, para evitar sorting via orderby a cada iteração. O que acha?
Acho que você vai gostar do post que compartilhamos hoje.
https://www.eximiaco.tech/pt/2019/06/12/estruturas-de-dados-heap-e-binary-heap-em-c/
Ah! Não havia chegado nele ainda. ☺️
Agora debugar até entender, muito bacana essa série, valeu Elemar!
Meu amigo olha que doideira: hoje mais cedo, pesquisando sobre DDD me deparei com um vídeo do Elemar no Youtube, agora pesquisando outro tema que está no mesmo ramo (programação), mas em outro departamento (código em si), vim parar no site da Eximia! Algoritmos dando resultado é isso! Hehehe, parabéns pelo trabalho meu caro!
Bom dia, para usar esse código é só montar ele todo seguido?